2022-01-11
2022-01-11
【2022年1月11日,中国·上海】智能驾驶与智慧出行领域的核心技术服务商上海智驾汽车科技有限公司(下称“智驾科技MAXIEYE”)宣布,新一代L2++级智能驾驶系统产品MAXIPILOT已成功部署NOM (Navigate on MAXIPILOT) 领航辅助驾驶功能,新功能将包含基础版、高配版、增强版三个版本,匹配不同算力平台及传感器配置方案,实现“点对点”智能驾驶。该系统预计于2022年面向乘用车客户规模化量产交付,并可通过OTA持续实现功能升级。
基础版NOM,基于5R1V的硬件配置,实现360度传感器融合,接入高精地图导航定位技术,可自主完成高速场景下的智能路径规划,实现自动进出匝道、切换主干道、根据道路限速和工况环境自动调整车速、自动变换车道、自动超车、大车安全避让等功能。

高配版NOM将基于5R5V的传感器配置及更大算力平台,实现高度集成的行泊一体智能化方案。行车方面,由于有环视摄像头做补充,将在拥堵等复杂场景下实现更低接管率;泊车方面,由于增加了前视远距离的摄像头,泊车速度将有所提高。

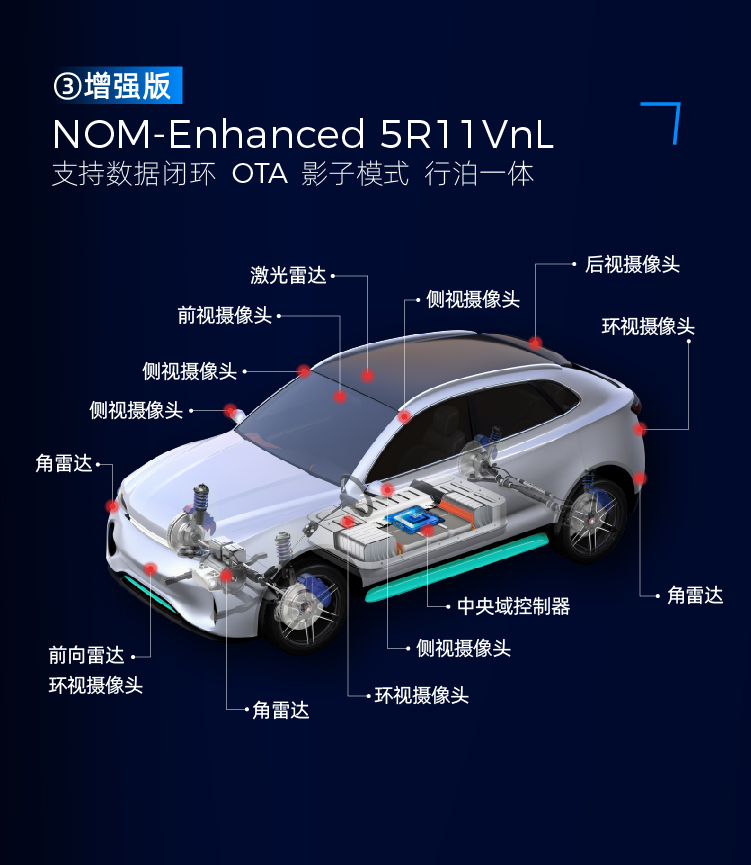
增强版NOM将基于5R11VnL的传感器配置,通过视觉和激光雷达等更多传感器冗余设置,拓展“点对点”自动驾驶系统边界,实现L3等高阶智能驾驶功能。
其中基础版NOM是MAXIEYE继MAXIPILOT1.0全速智能巡航系统量产后,推出的第一款L2++级智能领航辅助驾驶系统产品,基于深度学习感知算法、感知融合到规划控制的全栈技术链自研,沿袭MAXIPILOT“极致驾乘体验”的产品追求,赋能车厂客户为C端消费者提供更为安全、高效、舒适、智慧的驾乘方案。
该系统最显著的创新之处在于,从类人驾驶角度出发,通过FPP(Fused Path Planning)融合路径规划技术,有效解决地图/定位缺失、目标信息被遮挡等场景下的规划难题,提升系统的鲁棒性和用户驾乘体验。具体表现如下:
首先,当汽车行驶在高精地图完善的场景中,NOM系统会依托高精地图规划行驶策略。其次,在高精地图定位不准或缺失的场景中,通过车流信息、导航地图信息、围栏信息、路沿信息的融合应用,提升系统换道、上下匝道的稳定性,降低接管率。“人开车就是这样,在没有车道线的地方,你看到这个地方,不一定要顺着车道线或严格跟着高精地图走,跟着车流等信息,你依然可以通过。”MAXIEYE CTO郭恩庆解释道。
当地图定位与系统感知出现偏差时,系统将通过视觉感知生成局部拓扑图,将高精地图或者导航地图提供的拓扑图与自身感知的拓扑图进行比对,为车辆行驶路径提供“局部最优解”。
此外,NOM系统行车模式支持多种驾驶风格,用户可在不同场景下选择不同的行驶策略。如当用户想提高通勤效率时,可以设置为“通勤效率”优先模式,系统在进行策略规划时会提高“效率”权重。如果想要提高舒适性,可以设置为“驾乘舒适”优先模式,行驶过程中则会降低换道频次,提升行驶的舒适性。
“人人可享”是智驾科技MAXIEYE核心的产品理念,依托感知到规控全栈技术,针对不同客户市场需求匹配多线产品矩阵,通过基础安全型功能产品、舒适型智能巡航产品、智慧型“点对点”领航辅助系统产品,智驾科技MAXIEYE正向“人人可享的智能驾驶”迈进。
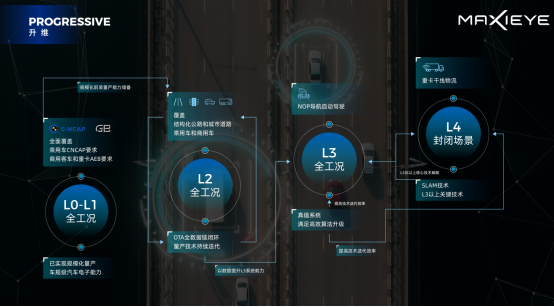
日前,智驾科技MAXIEYE从解决产业问题角度出发,面向行业发布了全新的智能驾驶分级理念,从L1到L4,依次解决人类出行的安全、舒适、效率、能耗问题。
截至2020年,MAXIEYE已通过AEB\LDW\FCW等L0 - L1 级安全型功能为数十万商用车安全护航。
2021年,解决驾驶舒适问题的L2 级MAXIPILOT1.0全速智能巡航系统发布即量产,通过极致地技术挖掘和设计降本,实现低功耗、高性价比等特点,同时打通OTA数据闭环,为更高阶系统方案搭建数据和技术壁垒。
此次发布的L2++级NOM智能领航辅助驾驶系统,将通过“点对点”智能驾驶,解决如通勤、跨城高速等出行场景的体验和效率问题。
与此同时,不久前智驾科技MAXIEYE宣布与国际领先的汽车电子企业德赛西威签署战略合作,共同部署商用车自动驾驶技术和运营服务,依托“辅助驾驶跨平台,自动驾驶分场景”的商业化战略,完成驾驶辅助到自动驾驶的全场景技术及商业模式探索部署。
未来智驾科技MAXIEYE将以数据驱动实现算法自强化,进一步加快技术的演进速度和产品的迭代速度,以驾驶辅助规模化落地推动智能驾驶科技平权时代到来的同时,通过自动驾驶运营等商业模式创新,迎接未来更加安全美好的智慧出行时代。